Equipe 2 - FABRICATION
|
Tout
commence par la modélisation en 3D du robot sur ordinateur.
|
 |
 |
Les
fichiers sont transférés vers Charlyrobot pour l'usinage
des pièces.
|
|
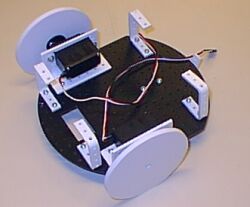
Les
différentes pièces du robot sont assemblées avec
des vis M3.
|
 |
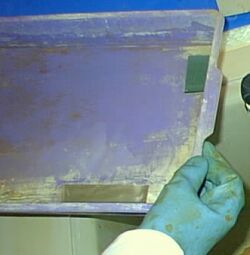 |
Les
circuits imprimés sont fabriqués par photogravure.
|
|
Le
robot est programmé en language BASIC.
|
 |