Le microcontrôleur
C'est le cerveau de l'ordinateur, c'est par lui que passent toutes les instructions du programme.Pour commander le robot, nous avons besoin d'un "cerveau" capable d'interpréter des instructions et de communiquer avec le monde extérieur. Le composant électronique que nous allons utiliser s'appelle un microcontrôleur. C'est un véritable ordinateur embarqué à bord du robot : Il est capable de compter, de lire et d'écrire sur les ports de communication, de générer des implusions pour piloter les moteurs et même de faire de la musique ! Pour le programmer, il suffit de saisir des instructions sur un ordinateur connecté au microcontrôleur puis de télécharger le progamme gràce à un câble de liaison. Une fois déconnecté, le robot est alors autonome et il exécute les tâches pour lesquelles il a été programmé.
Pour ce projet, nous avons choisi le BASIC STAMP de chez PARALLAX Inc. pour son langage de programmation accessible, son prix et sa simplicité de mise en oeuvre. Il existe cependant d'autres microcontrôleurs comme le PICBASIC ou le PICAXE qui se programment grâce à une interface graphique un peu plus pratique que notre éditeur Basic. Le choix du microcontrôleur est d'abord une question de budget , à vous de faire la comparaison.
Le Basic stamp :

Le Picaxe :

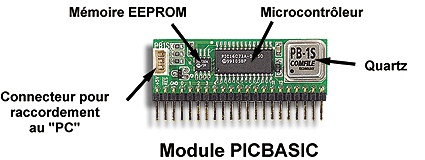
Le PicBasic :